Çevrelerini Algılayarak Karar Verebilen Robotlar
Genel amaç için üretilen bir anlamda sıradan diyebileceğimiz robotların çok yönlü dahi olsalar birçok sınırları bulunuyor. Bu fiziksel ve teknolojik limitlerin birçoğu da verimi...

Genel amaç için üretilen bir anlamda sıradan diyebileceğimiz robotların çok yönlü dahi olsalar birçok sınırları bulunuyor. Bu fiziksel ve teknolojik limitlerin birçoğu da verimi düşük uygulama alanları ve yüksek bütçeleri dolayısıyla ortaya çıkıyor. Bu nedenle de robotik teknolojisi, tüm boyutlardaki robotlar için, robotlara elverişli olabilecekleri tek bir görevi addederek bunu görevi yapmalarına odaklanıyor.
Yine de modüler robotlar, yani takılıp çıkarılabilir modül adı verilen değiştirilebilir parçalardan oluşan robotlar, işlevsel olarak daha esnek olabiliyor. Eğer bir parça bir şekilde arızalanır veya değiştirilmek istenirse, bu da kolayca yapılabiliyor. Robotun bileşenleri de istenildiği gibi yeniden ayarlanıp organize edilebilir hatta şimdi robotlar artık kendi kendilerini konfigüre edebilecekler.
Yeni araştırma ile, navige ettikleri ve içinde bulundukları çevreyi ve fiziksel şartları algılayarak bu konfigürasyonu robotların kendilerinin yapabilecekleri gösterildi.
Cornell University araştırmacılarının önderliğindeki araştırma ekibi, çevrelerini algılayarak karar verebilen ve otonom olarak belirli bir görevin gerçekleştirilmesi için farklı şekillere ve konfigüratif yapıya girebilen robot geliştirmeyi başardı. Bu başarı sayesinde, adapif, çok amaçlı robotlara bir adım daha yaklaşılmış oldu.
Bu araştırma, bilim insanlarına göre modüler robotların otonom yeniden yapılanma ve algılama yetilerine göre davranışlarını değiştirme yeteneği kazandığı ve bunun mümkün olabileceğini gösteren ilk araştırma.
Sonuçları ve araştırmanın detayları Science Robotics'te yayımlandı.
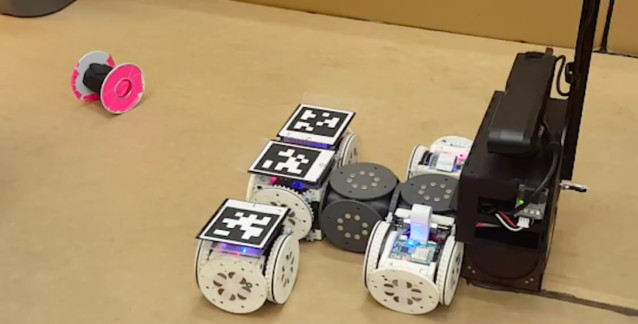
Mevcut araştırmadaki robotlar, tekerlekli küp şeklindeki modüllerden oluşuyor ve bu modüller birleşip yeniden ana mekanizmaya bağlanabiliyor. Bu sayede yeni yetenekler ve şekiller kazanan robotlar, modülleri arasında Wi-Fi ile merkezi bir sistemden iletişim kurulması ve magnetler ile bağlanıp birbirlerinden ayrılarak bu özeliklerini hayata geçiriyorlar.
Cornell University'den makine mühendisliği doçenti ve projenin lideri Hadas Kress-Gazit'e göre, diğer modüler robotlar kontrollü bir çevrede ve değişken olmayan şartlarda başarılı bir şekilde gerçekleştirebilirken, bu yeni araştırmada geliştirilen robotlar tamamen otonom davranış biçimi gösterip değişiklik gösteren ve konfigürasyonunu değiştirebilen ilk robotlar olma özelliği gösteriyor.
Bu yetenek ile aşağıdaki videoda da görülebilen robotlar, amaçlarını, ne yapacaklarını ve nasıl bir formda olabileceklerine kendileri karar verebiliyorlar.
Çalışmanın fonu National Science Foundation tarafından sağlanmıştır.
Yine de modüler robotlar, yani takılıp çıkarılabilir modül adı verilen değiştirilebilir parçalardan oluşan robotlar, işlevsel olarak daha esnek olabiliyor. Eğer bir parça bir şekilde arızalanır veya değiştirilmek istenirse, bu da kolayca yapılabiliyor. Robotun bileşenleri de istenildiği gibi yeniden ayarlanıp organize edilebilir hatta şimdi robotlar artık kendi kendilerini konfigüre edebilecekler.
Yeni araştırma ile, navige ettikleri ve içinde bulundukları çevreyi ve fiziksel şartları algılayarak bu konfigürasyonu robotların kendilerinin yapabilecekleri gösterildi.
Cornell University araştırmacılarının önderliğindeki araştırma ekibi, çevrelerini algılayarak karar verebilen ve otonom olarak belirli bir görevin gerçekleştirilmesi için farklı şekillere ve konfigüratif yapıya girebilen robot geliştirmeyi başardı. Bu başarı sayesinde, adapif, çok amaçlı robotlara bir adım daha yaklaşılmış oldu.
Bu araştırma, bilim insanlarına göre modüler robotların otonom yeniden yapılanma ve algılama yetilerine göre davranışlarını değiştirme yeteneği kazandığı ve bunun mümkün olabileceğini gösteren ilk araştırma.
Sonuçları ve araştırmanın detayları Science Robotics'te yayımlandı.
Mevcut araştırmadaki robotlar, tekerlekli küp şeklindeki modüllerden oluşuyor ve bu modüller birleşip yeniden ana mekanizmaya bağlanabiliyor. Bu sayede yeni yetenekler ve şekiller kazanan robotlar, modülleri arasında Wi-Fi ile merkezi bir sistemden iletişim kurulması ve magnetler ile bağlanıp birbirlerinden ayrılarak bu özeliklerini hayata geçiriyorlar.
Cornell University'den makine mühendisliği doçenti ve projenin lideri Hadas Kress-Gazit'e göre, diğer modüler robotlar kontrollü bir çevrede ve değişken olmayan şartlarda başarılı bir şekilde gerçekleştirebilirken, bu yeni araştırmada geliştirilen robotlar tamamen otonom davranış biçimi gösterip değişiklik gösteren ve konfigürasyonunu değiştirebilen ilk robotlar olma özelliği gösteriyor.
Bu yetenek ile aşağıdaki videoda da görülebilen robotlar, amaçlarını, ne yapacaklarını ve nasıl bir formda olabileceklerine kendileri karar verebiliyorlar.
Çalışmanın fonu National Science Foundation tarafından sağlanmıştır.
Kaynak ve İleri Okuma
- Jonathan Daudelin, Gangyuan Jing, Tarik Tosun, Mark Yim, Hadas Kress-Gazit, Mark Campbell. An integrated system for perception-driven autonomy with modular robots. Science Robotics, 2018; 3 (23): eaat4983 http://robotics.sciencemag.org/content/3/23/eaat4983
- Melanie Lefkowitz, Shape-shifting modular robot is more than the sum of its parts, 31 Ekim 2018, Cornell University Chronicle Website http://news.cornell.edu/stories/2018/10/shape-shifting-modular-robot-more-sum-its-parts
Etiket
Projelerimizde bize destek olmak ister misiniz?
Dilediğiniz miktarda aylık veya tek seferlik bağış yapabilirsiniz.
Destek Ol
Yorum Yap (0)
Bunlar da İlginizi Çekebilir

28 Ağustos 2017
Yapay Zekânın Kalbindeki Karanlık Sır


18 Eylül 2015
Mesleğinizi Robotlar mı Kapacak?
03 Eylül 2018
Tümör Gelişimini Tahmin Edebilen Yapay Zeka
30 Aralık 2015
İnsan Gibi Öğrenen Makineler
14 Ekim 2016
Yapay Sinir Sistemleri Beyinden İlham Alacak
Bağış Yap, Destek Ol!
Projelerimizde bize destek olmak istersen
Patreon üzerinden aylık veya tek seferlik
bağışta bulunabilirsin.
En Çok Okunan
Bu Ay Öne Çıkanlar


2
İnsanlık Uygarlığı Neden Bu Kadar Geç Keşfetti?

Gürkan Akçay
Boğaziçi Üniversitesi - Yazar / Editör

E-Bülten Üyeliği
Duyurulardan e-posta ile haberdar olmak istiyorum.