Robot Teknolojisinde Sıçrama Yaratacak Arı Modeli
University of Sheffield'den bilim insanları arıların duvarlara çarpmamalarını sağlayan mekanizmaya dayalı bir bilgisayar programı yaratmayı başardılar. Bu gelişme sayesinde, oto...


University of Sheffield'den bilim insanları arıların duvarlara çarpmamalarını sağlayan mekanizmaya dayalı bir bilgisayar programı yaratmayı başardılar. Bu gelişme sayesinde, otonom robot teknolojisinde büyük bir ilerleme kaydedilebilir.
Üniversitenin Bilgisayar Bilimi Bölümü'nden araştırmacılar, arıların görme duyularına bağıl şekilde işleyen çevrelerindeki dünyanın ne yöne ve ne hızla hareket ettiğini saptama yetisi ve bununla ilişkili olarak nesnelere ve kendi popülasyonlarından bireylere çarpmalarını engelleyen sistemlerini incelemelerini sağlayacak bir bilgisayar modeli geliştirdi.
Arılar kendi uçuşlarını, görsel olarak canlandırdıkları çevrelerinin hareket hızına bakarak kontrol eder. Görsel debi veya optik debi diyebileceğimiz (İng. optic flow) sistemini kullanan arıların; hareketleri esnasında etraflarının kendilerine göre hızını hesaplayarak uçuşlarını kontrol ettiklerini gösteren çalışmalar mevcut. Ne var ki; bunu nasıl başardıkları yönünde henüz net bir bilgiye sahip değiliz. Bugüne kadar böcek beyninde keşfedilmiş tek nöral devre (sinir bağlantıları devresi) hareketin ancak yönünü söyleyebiliyor, hızını değil.
Mevcut araştırma ise, hareket-yönü habercisi olan devrelerin, aynı zamanda nasıl hareket-hızı tespiti sağlayabileceğini ve bu sistemin arıların uçuşunun kontrolünde ne kadar hayati bir rol oynadığını gösteriyor.
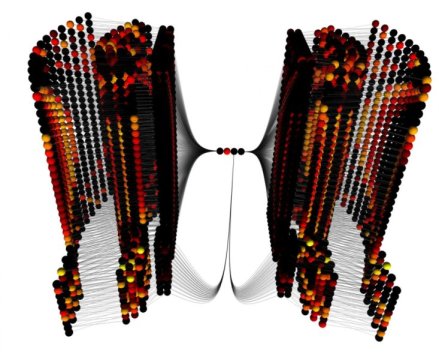 Çalışır haldeki modelden alınmış bir anlık görüntü. Görseldeki her küre bir hesapsal birimi simgeliyor ve aralardaki çizgilerde bu birimler arasındaki bağlantıları gösteriyor. Renkler her birimin değerine göre değişiklik gösterirken; solda ve sağda girdiler, merkezde ise çıktılar görülüyor. Merkezdeki bu çıktılar ise bilgisayar simülasyonu olan bir koridor labirentte uçmakta olan sanal arımızın yol göstericileri oluyor. Telif : The University of Sheffield Çalışır haldeki modelden alınmış bir anlık görüntü. Görseldeki her küre bir hesapsal birimi simgeliyor ve aralardaki çizgilerde bu birimler arasındaki bağlantıları gösteriyor. Renkler her birimin değerine göre değişiklik gösterirken; solda ve sağda girdiler, merkezde ise çıktılar görülüyor. Merkezdeki bu çıktılar ise bilgisayar simülasyonu olan bir koridor labirentte uçmakta olan sanal arımızın yol göstericileri oluyor. Telif : The University of Sheffield
Çalışır haldeki modelden alınmış bir anlık görüntü. Görseldeki her küre bir hesapsal birimi simgeliyor ve aralardaki çizgilerde bu birimler arasındaki bağlantıları gösteriyor. Renkler her birimin değerine göre değişiklik gösterirken; solda ve sağda girdiler, merkezde ise çıktılar görülüyor. Merkezdeki bu çıktılar ise bilgisayar simülasyonu olan bir koridor labirentte uçmakta olan sanal arımızın yol göstericileri oluyor. Telif : The University of Sheffield Çalışır haldeki modelden alınmış bir anlık görüntü. Görseldeki her küre bir hesapsal birimi simgeliyor ve aralardaki çizgilerde bu birimler arasındaki bağlantıları gösteriyor. Renkler her birimin değerine göre değişiklik gösterirken; solda ve sağda girdiler, merkezde ise çıktılar görülüyor. Merkezdeki bu çıktılar ise bilgisayar simülasyonu olan bir koridor labirentte uçmakta olan sanal arımızın yol göstericileri oluyor. Telif : The University of Sheffield
Makalenin yazarlarından Dr. Alex J. Cope, bal arılarının mükemmel yön tayincileri ve kaşifler olduğunu belirtiyor. Görme duyularını bu yönde ileri düzeyde kullanan bal arıları; bunu yalnızca bir milyon nörondan oluşan minik beyinlerine rağmen başarı ile gerçekleştiriyorlar.Dr. Cope yaptığı açıklamada şöyle söylüyor : "Arıların duvarlardan nasıl kaçındıklarının ve navigasyon için hangi bilgileri kullandıklarının anlaşılması, bizi; kendi kendine uçabilen robotların performansını büyük oranda artırmamızı sağlayacak olan verimli navigasyon ve yol bulma algoritmalarını geliştirmeye biraz daha yaklaştırıyor."
Projenin lideri Profesör James Marshall; bu tespitin, arıların (hatta benzer görme duyularına sahip olan diğer bir takım uçan böcekler de sayılabilir) neden pencerelerde zorlandıklarını ve çarpıp durduklarını açıklayabileceğini belirtiyor. Muhtemelen transparan olan bu cisimlere yaklaşan arılar herhangi bir 'optic flow' bilgisi alamıyor ve aslında kapalı olan bu boş sandıkları yerlerden geçmeye çalışıyorlar.
Kaynak : Alex J. Cope, Chelsea Sabo, Kevin Gurney, Eleni Vasilaki, James A. R. Marshall. A Model for an Angular Velocity-Tuned Motion Detector Accounting for Deviations in the Corridor-Centering Response of the Bee. PLOS Computational Biology, 2016; 12 (5): e1004887 DOI:10.1371/journal.pcbi.1004887
Üniversitenin Bilgisayar Bilimi Bölümü'nden araştırmacılar, arıların görme duyularına bağıl şekilde işleyen çevrelerindeki dünyanın ne yöne ve ne hızla hareket ettiğini saptama yetisi ve bununla ilişkili olarak nesnelere ve kendi popülasyonlarından bireylere çarpmalarını engelleyen sistemlerini incelemelerini sağlayacak bir bilgisayar modeli geliştirdi.
Arılar kendi uçuşlarını, görsel olarak canlandırdıkları çevrelerinin hareket hızına bakarak kontrol eder. Görsel debi veya optik debi diyebileceğimiz (İng. optic flow) sistemini kullanan arıların; hareketleri esnasında etraflarının kendilerine göre hızını hesaplayarak uçuşlarını kontrol ettiklerini gösteren çalışmalar mevcut. Ne var ki; bunu nasıl başardıkları yönünde henüz net bir bilgiye sahip değiliz. Bugüne kadar böcek beyninde keşfedilmiş tek nöral devre (sinir bağlantıları devresi) hareketin ancak yönünü söyleyebiliyor, hızını değil.
Mevcut araştırma ise, hareket-yönü habercisi olan devrelerin, aynı zamanda nasıl hareket-hızı tespiti sağlayabileceğini ve bu sistemin arıların uçuşunun kontrolünde ne kadar hayati bir rol oynadığını gösteriyor.
Çalışır haldeki modelden alınmış bir anlık görüntü. Görseldeki her küre bir hesapsal birimi simgeliyor ve aralardaki çizgilerde bu birimler arasındaki bağlantıları gösteriyor. Renkler her birimin değerine göre değişiklik gösterirken; solda ve sağda girdiler, merkezde ise çıktılar görülüyor. Merkezdeki bu çıktılar ise bilgisayar simülasyonu olan bir koridor labirentte uçmakta olan sanal arımızın yol göstericileri oluyor. Telif : The University of Sheffield Çalışır haldeki modelden alınmış bir anlık görüntü. Görseldeki her küre bir hesapsal birimi simgeliyor ve aralardaki çizgilerde bu birimler arasındaki bağlantıları gösteriyor. Renkler her birimin değerine göre değişiklik gösterirken; solda ve sağda girdiler, merkezde ise çıktılar görülüyor. Merkezdeki bu çıktılar ise bilgisayar simülasyonu olan bir koridor labirentte uçmakta olan sanal arımızın yol göstericileri oluyor. Telif : The University of SheffieldMakalenin yazarlarından Dr. Alex J. Cope, bal arılarının mükemmel yön tayincileri ve kaşifler olduğunu belirtiyor. Görme duyularını bu yönde ileri düzeyde kullanan bal arıları; bunu yalnızca bir milyon nörondan oluşan minik beyinlerine rağmen başarı ile gerçekleştiriyorlar.Dr. Cope yaptığı açıklamada şöyle söylüyor : "Arıların duvarlardan nasıl kaçındıklarının ve navigasyon için hangi bilgileri kullandıklarının anlaşılması, bizi; kendi kendine uçabilen robotların performansını büyük oranda artırmamızı sağlayacak olan verimli navigasyon ve yol bulma algoritmalarını geliştirmeye biraz daha yaklaştırıyor."
Projenin lideri Profesör James Marshall; bu tespitin, arıların (hatta benzer görme duyularına sahip olan diğer bir takım uçan böcekler de sayılabilir) neden pencerelerde zorlandıklarını ve çarpıp durduklarını açıklayabileceğini belirtiyor. Muhtemelen transparan olan bu cisimlere yaklaşan arılar herhangi bir 'optic flow' bilgisi alamıyor ve aslında kapalı olan bu boş sandıkları yerlerden geçmeye çalışıyorlar.
Kaynak : Alex J. Cope, Chelsea Sabo, Kevin Gurney, Eleni Vasilaki, James A. R. Marshall. A Model for an Angular Velocity-Tuned Motion Detector Accounting for Deviations in the Corridor-Centering Response of the Bee. PLOS Computational Biology, 2016; 12 (5): e1004887 DOI:10.1371/journal.pcbi.1004887
Bu içerik BilimFili.com yazarı tarafından oluşturulmuştur. BilimFili.com`un belirtmiş olduğu “Kullanım İzinleri”ne bağlı kalmak kaydıyla kullanabilirsiniz.
Kaynak ve İleri Okuma
Etiket
Projelerimizde bize destek olmak ister misiniz?
Dilediğiniz miktarda aylık veya tek seferlik bağış yapabilirsiniz.
Destek Ol
Yorum Yap (0)
Bunlar da İlginizi Çekebilir

25 Mayıs 2015
Köpeklerin Evcilleşmesinin Kökeni

13 Eylül 2017
Deniz Sürüngenlerinin Tarihi


29 Mart 2015
Yarasalar da İnsanlar Gibi Ses Öğreniyor

28 Kasım 2017
Sinekler Sandığımızdan Daha Tehlikeli Olabilir

17 Temmuz 2015
Yabani Kuşlar da Dil Öğrenebiliyor!

31 Mayıs 2017
Bir Dilbalığı Türünde Türleşme Gözlemlendi

21 Haziran 2017
Tarla Farelerinde Beyin Uyarımı Yoluyla "İlk Görüşte Aşk"
Bağış Yap, Destek Ol!
Projelerimizde bize destek olmak istersen
Patreon üzerinden aylık veya tek seferlik
bağışta bulunabilirsin.
En Çok Okunan
Bu Ay Öne Çıkanlar


2
İnsanlık Uygarlığı Neden Bu Kadar Geç Keşfetti?

Gürkan Akçay
Boğaziçi Üniversitesi - Yazar / Editör

E-Bülten Üyeliği
Duyurulardan e-posta ile haberdar olmak istiyorum.